AGV autonóm jármű fejlesztése ipari logisztikai és mezőgazdasági feladatok ellátására
 Célkitűzés:
Célkitűzés: - AGV moduláris elemekből felépülő, az aktuális feladathoz (anyagmozgatás, felderítés, járőrözés, betakarítás, öntözés, permetezés, stb.) méretezhető jármű tervezése és megépítése, mely 5G vagy saját belső hálózaton is távvezérelhető, távfelügyelhető.
- Leírás:
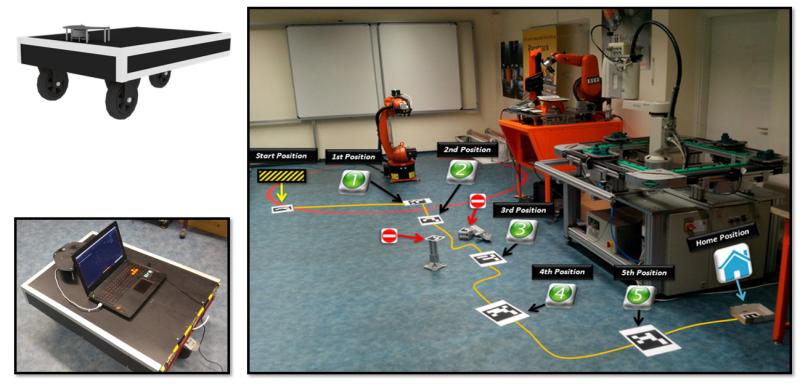
- Autonóm járművek fejlesztése az ipari logisztikai feladatok ellátása mellett mezőgazdasági feladatok ellátása érdekében is folyik. Megkezdődött egy saját AGV (Automated Guided Vehicle) jármű fejlesztése, amely saját képfeldolgozó rendszert alkalmaz a navigáció terén, illetve Augmented Reality (Kiterjesztett valóság) technológiával történik a feladatmeghatározás és a pálya kijelölése.
- A kialakítandó tesztelési környezetben, nagyfelbontású Vision szenzorok segítségével valósul meg képelemzés az adott területen. Mivel a szenzorok hálózatra vannak csatolva, így a PTZ IP kamerák képei streamelhetőek és lekérdezhetőek az autonóm jármű számára, így detektálhatóak az esetleges akadályok és személyek a környezetében.
- Amennyiben a jármű nem rendelkezik külön épületen belül található Vision szenzorokkal, mert szabad téri alkalmazása az elsődleges követelmény (pl. mezőgazdasági feladatok), úgy a jármű ezen szenzoros feladatát egy mobil kishatótávú drón egység tölti be. A drón az autonóm járművön foglal helyet, mely egyben alkalmas annak töltésére és Marker/QR kód jelöli a pozíciókat a feltérképezéshez.
- Az adatok hálózaton történő feldolgozásában és kiértékelésében a Linux alapú ROS OS (Robot Operating System) végzi, melyet az autóipar is széleskörben alkalmaz. Az új AGV moduláris elemekből épülne fel, így mindig az adott feladathoz lenne méretezhető (pl. anyagmozgatási, felderítés, járőrözési, betakarítási, öntözési/permetezési feladatok). A jármű maga 5G, vagy saját belső hálózaton is távvezérelhető, távfelügyelhető lenne.
- Az akkumulátor pakkok szintén cserélhetők és bővíthetők lennének a bejárandó terület méretének függvényében, valamint HMI-t (Human Machine Interface) is kapna, ahol lekérdezhetőek a ciklusa alatt elvégzett feladatok és az esetlegesen fellépő gépi igények (tartály újra töltés, akkumulátor töltés). Mivel a mezőgazdasági terület kevésbé tekinthető izolált környezetnek, így ott esetlegesen „random” események is jelentkezhetnek például időjárás vagy más külső behatás következtében. Deep Learning módszer segítségével történne az autonóm jármű tanítása, hogy minél szélesebb spektrumban legyen lehetősége felismerni, helyesen lereagálni a megváltozott környezetet.
Last update:
2023. 10. 16. 15:11