Egyedi fejlesztésű kollaboratív robotkarok és ipari megfogók fejlesztése
 Célkitűzés:
Célkitűzés: - Egyedi kollaboratív robotegység tervezése és gyártása, meglévő gépegységek továbbfejlesztésére vezérlők, megfogók alkalmazásával.
- Leírás:
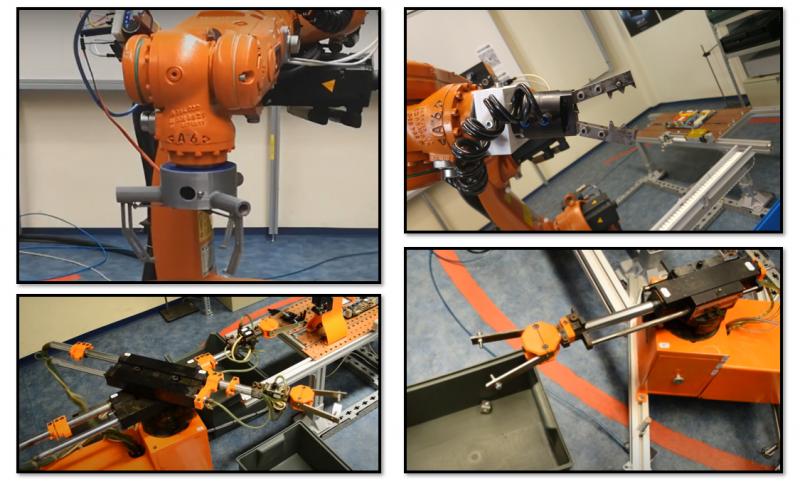
- Az ipari kollaboratív robotok fontos pillérei az iparnak, de számos ponton lehetőség mutatkozik a régi gépegységek továbbfejlesztésére is, legyen szó vezérlőről vagy megfogóról. A kifejlesztett egyedi kollaboratív robotegységek saját HMI/GUI-val és önálló vezérlő rendszerrel rendelkeznek. A robotkar tervezése 3D CAD szoftverrel történik, amit FEM szimuláció követ.
- Az eredmények kiértékelése után történik meg az additív gyártási eljárás kiválasztása, majd az elemek legyártása és a robotkar összeszerelése. Az egyedi fejlesztésű megfogók tervezésére és gyártása hasonló módon történik, a megfogók méretezése a megadott feladat igénye szerint történik. A megfogóval szemben támasztott fő kritériumok egyike a nagy flexibilitás, vagyis hogy a robot egységek vezérlőrendszere és a beágyazott Operációs Rendszerüktől függetlenül is csatlakoztathatóak legyenek. A megfogók moduláris felépítésűek, mindegyik típus esetén biztosított a képelemzés a hálózaton keresztül (beépített kamera segítségével). Így az esetlegesen sérült elemek is kiszűrhetőkké válnának a gyártósorokon.
- Az adatok tárolása a megfogón belül is lehetséges, ha egy egykártyás számítógépet is tartalmaz így MicroSD kártyás tárolást is megvalósíthatunk. A gyártósoron dolgozó operátor le tudná tölteni az adott műszak során tárolt adatokat azok további kielemzése céljából. A moduláris felépítésnek köszönhetően a hallgatók maguk is tervezhetnek további elemeket és kiegészítő modulokat. Az ipari partnereinkkel is megosztásra kerülnek az elért eredmények. Ezt követően dönthetnek annak integrációjáról a saját gyártó rendszereikbe, így időt és költséget megtakarítva.
Last update:
2023. 10. 16. 15:11