Kutatási témák:
- Ipar 4.0 gyártórendszerek AR/VR betanítást segítő oktatási szoftverek fejlesztése
- Gépjárművek ütközésbiztonságának fokozása konstrukciós megoldással
- Valós, fizikai gyártórendszerek virtuális elérhetőségének biztosítása a kiberfizikai rendszerbe való integrálásával
- AGV autonóm jármű fejlesztése ipari logisztikai és mezőgazdasági feladatok ellátására
- Egyedi fejlesztésű kollaboratív robotkarok és ipari megfogók fejlesztése
Ipar 4.0 gyártórendszerek AR/VR betanítást segítő oktatási szoftverek fejlesztése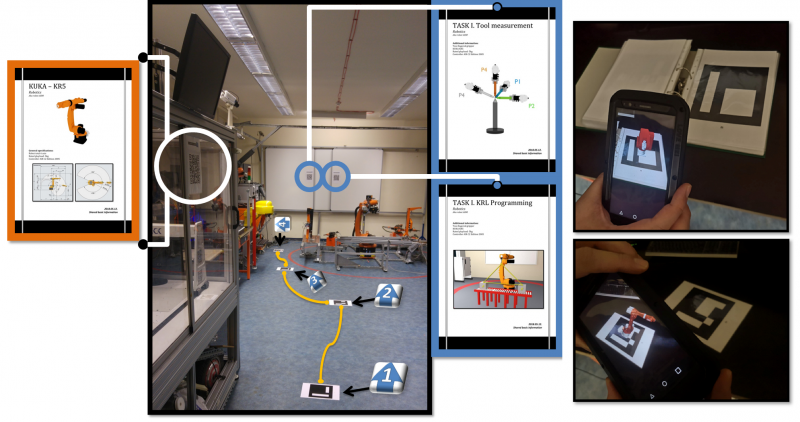
- Célkitűzés
- A robottechnika területén az aktuális virtualizációs technológiák innovatív integrálása az oktatásba.
- Az oktatási módszerek igazítása Ipar 4.0 elvárásaihoz.
- További információk
 Gépjárművek ütközésbiztonságának fokozása konstrukciós megoldással
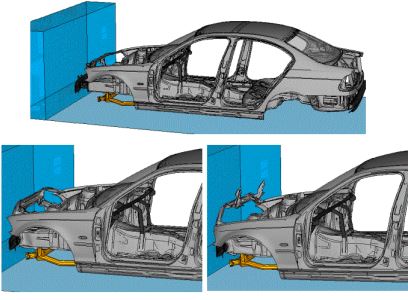
Gépjárművek ütközésbiztonságának fokozása konstrukciós megoldással
- Célkitűzés:
- A kutatás célja a gépjárművek ütközésbiztonságának fokozása a tömegoptimalizáció figyelembe vételével.
- Ezt a látszólag ellentétes követelményt csak új társított anyagok kifejlesztésével és optimalizált konstrukcióval érhető el.
- További információk
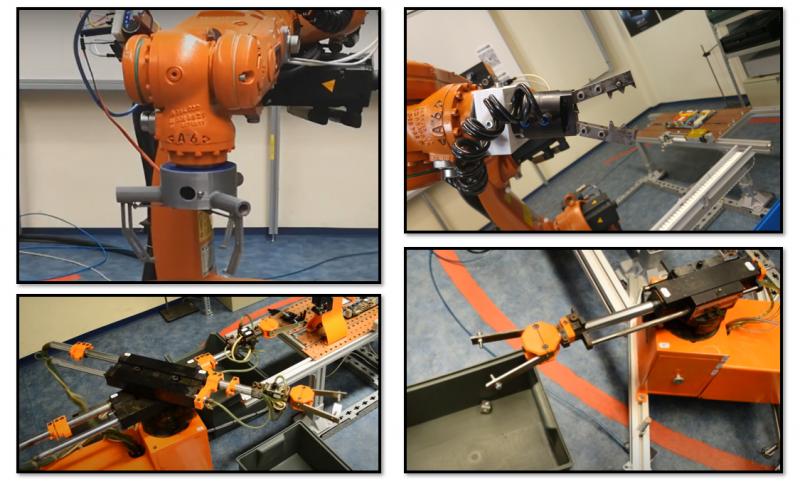
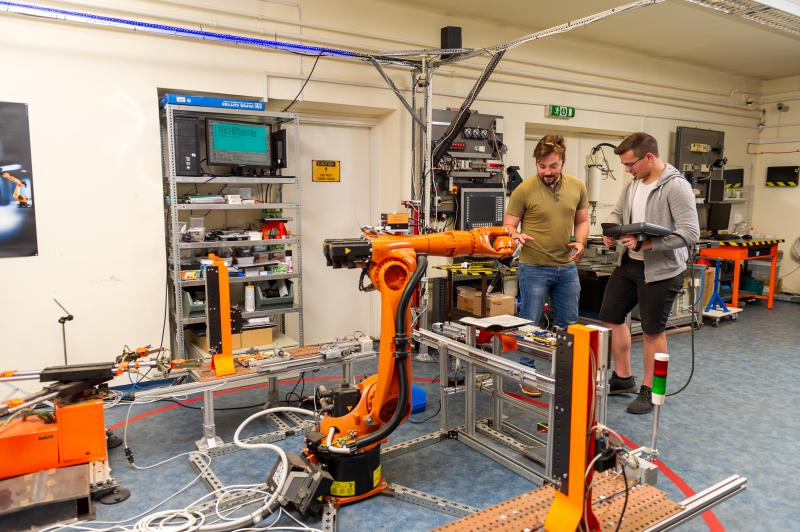 Valós, fizikai gyártórendszerek virtuális elérhetőségének biztosítása a kiberfizikai rendszerbe való integrálásával
Valós, fizikai gyártórendszerek virtuális elérhetőségének biztosítása a kiberfizikai rendszerbe való integrálásával
- Célkitűzés:
- Valós rendszerek áthelyezése a kibertérbe.
- A fejlesztés során az alkalmazott robotrendszerek kiberfizikai térbe való átültetésekor a valósághű ábrázolás fontos kritérium.
- További információk
AGV autonóm jármű fejlesztése ipari logisztikai és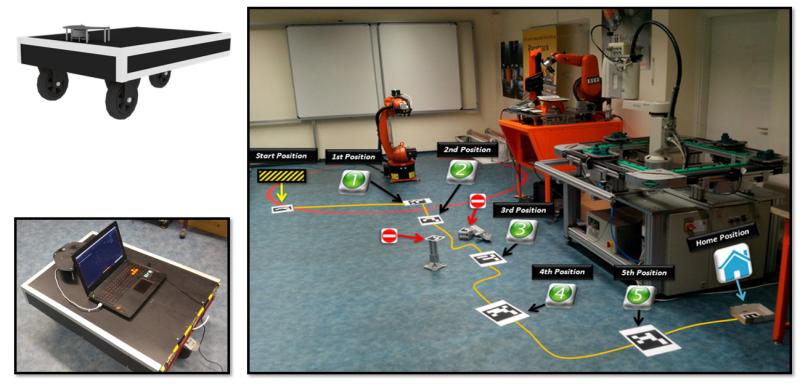 mezőgazdasági feladatok ellátására
mezőgazdasági feladatok ellátására
- Célkitűzés:
- AGV moduláris elemekből felépülő, az aktuális feladathoz (anyagmozgatás, felderítés, járőrözés, betakarítás, öntözés, permetezés, stb.) méretezhető jármű tervezése és megépítése, mely 5G vagy saját belső hálózaton is távvezérelhető, távfelügyelhető.
- További információk
 Egyedi fejlesztésű kollaboratív robotkarok és ipari megfogók fejlesztése
Egyedi fejlesztésű kollaboratív robotkarok és ipari megfogók fejlesztése
- Célkitűzés:
- Egyedi kollaboratív robotegység tervezése és gyártása, meglévő gépegységek továbbfejlesztésére vezérlők, megfogók alkalmazásával.
- A robotkar tervezése 3D CAD szoftverrel történik, amit FEM szimuláció követ.
- További információk
Legutóbbi frissítés:
2025. 06. 23. 14:22