
Development of educational software for Industry 4.0 manufacturing systems AR / VR
 Objective:
Objective:
- Innovative integration of current virtualization technologies in the field of robotics into education.
- Adapting teaching methods to the requirements of Industry 4.0.
- Description:
- Industry 4.0 poses new challenges for engineers. The pace of technological development has created problems, and requires adaptability and applicability on the part of users. The tools are given, but their integration into the industry or education has only been achieved to a small extent.
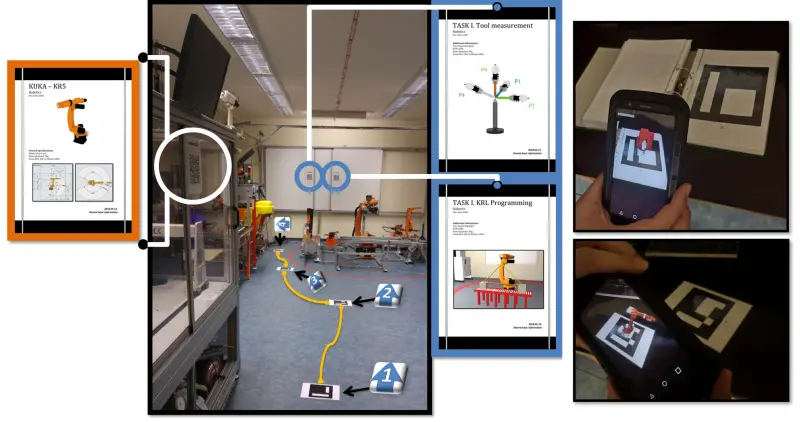
- The results of the research and development carried out in the Cyber-Physical & Intelligent Robot Systems laboratory should be presented to future engineers using augmented/virtual reality tools. Augmented reality-based systems make it possible to design 3D models of custom systems and integrate them into a dedicated simulation environment, which can be associated with various basic pieces of information for students or industrial partners.
- AR technology can also be used to visualize individual production processes using markers/QR codes. With proprietary training/maintenance applications developed using VR systems, individual industrial tasks could be mastered. The modelling exercises involve the virtual reproduction of a real machine unit or a specific manufacturing system with the same physical parameters, so that even the robot unit can be trained and programmed online without the use of a real machine.
Ensuring the virtual availability of real, physical production systems by integrating them into the cyber-physical system
 Objective:
Objective:
- Moving real systems into cyberspace.
- Description:
- The moving of real life to ciber space is an important tool for increasing efficiency, freeing up the time needed to perform the extra tasks required for digitization and data processing so that other productive work may be done.
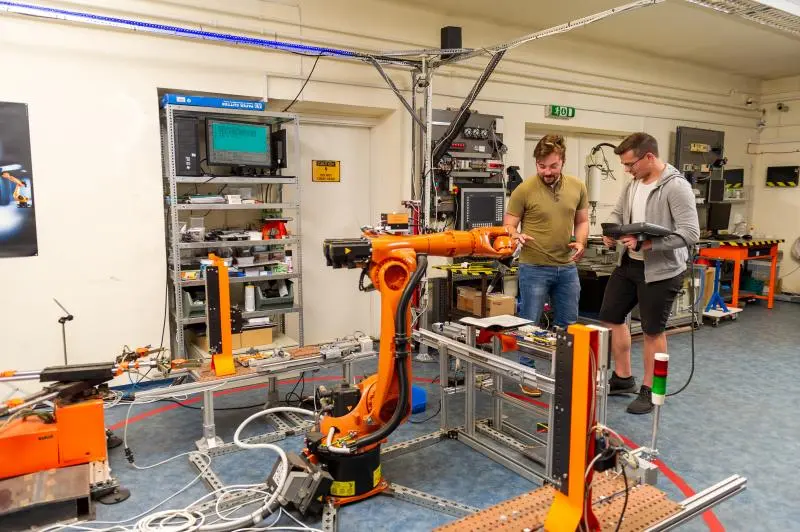
- Realistic representations are an important criterion for the development of laboratory robot systems in cyber-physical space. After polygon reduction, the models are uploaded to a different proprietary server database, from which they could only be categorized and retrieved using only markers, via an internal network. 3D models represent reality in terms of size and other physical parameters, so they can be coupled to perform tasks that can be performed with real machines.
- Robot units integrated into a dedicated simulation environment will be programmable and controllable. The aim of the developed system is not only to design a realistic replica of the lab in its own isolated environment, but also to achieve that the programs written "offline" are connected to the real machines in the cyber-physical space and can be run (hardware in the loop / software in the loop).
- The system would allow us to safely run custom controls and tests virtually, and if they yield good results, they could be run on real machines.
Development of an AGV autonomous vehicle for industrial logistics and agricultural tasks
 Objective:
Objective:
- The design and construction of a vehicle made up of modular AGV components, scalable to the task at hand (material handling, reconnaissance, patrolling, harvesting, irrigation, spraying, etc.), which can be remotely controlled and monitored via 5G or its own internal network.
- Description:
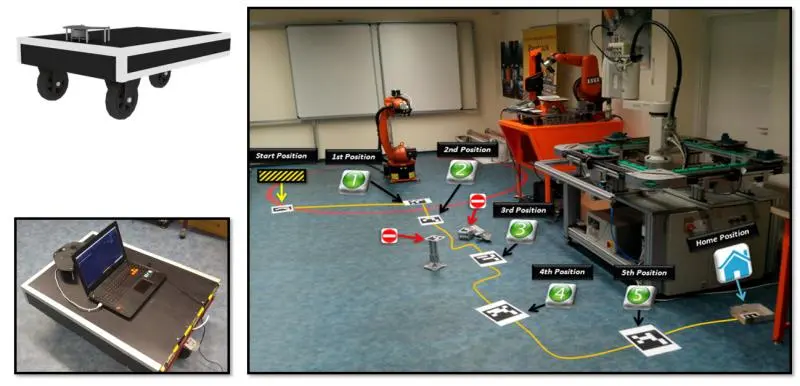
- Autonomous vehicles are being developed to perform agricultural tasks as well in addition to industrial logistics tasks. Development has started on an AGV (Automated Guided Vehicle), which uses its own image processing system for navigation and Augmented Reality technology for task definition and track designation.
- In the test environment to be developed, image analysis will be carried out using high-resolution Vision sensors. Since the sensors are connected to a network, the images from the PTZ IP cameras can be streamed and retrieved by the autonomous vehicle, allowing the detection of possible obstacles and people in its vicinity.
- In case the vehicle is not equipped with Vision sensors located inside a separate building as its primary requirement is to be used in open spaces (e.g. agricultural tasks), a short-range mobile drone unit will be used to perform the vehicle’s sensory function. The drone sits on the autonomous vehicle, which marks the positions for mapping with Marker/QR codes and also charges the drone.
- The data is processed and evaluated on the network by the Linux-based ROS OS (Robot Operating System), which is widely used by the automotive industry. The data is processed and evaluated on the network by the Linux-based ROS OS (Robot Operating System), which is widely used in the automotive industry. The new AGV would be made up of modular elements, so it would always be scalable to the task at hand (e.g. material handling, reconnaissance, patrolling, harvesting, irrigation/spraying). The vehicle itself could be remotely controlled and monitored via 5G or its own internal network.
- The battery packs would also be replaceable and expandable depending on the size of the area to be covered and would be equipped with an HMI (Human Machine Interface) to check the tasks performed during its cycle and any machine needs (tank recharge, battery charging). As the agricultural area is less isolated, it may also be subject to "random" events, for example due to weather or other external influences. Deep Learning would be used to teach the autonomous vehicle to recognize and correctly react to the changed environment in as broad a spectrum as possible.
Development of customized collaborative robotic arms and industrial grippers
 Objective:
Objective:
- Designing and manufacturing a customized collaborative robot unit in order to further develop existing machine units using controllers and grippers.
- Description:
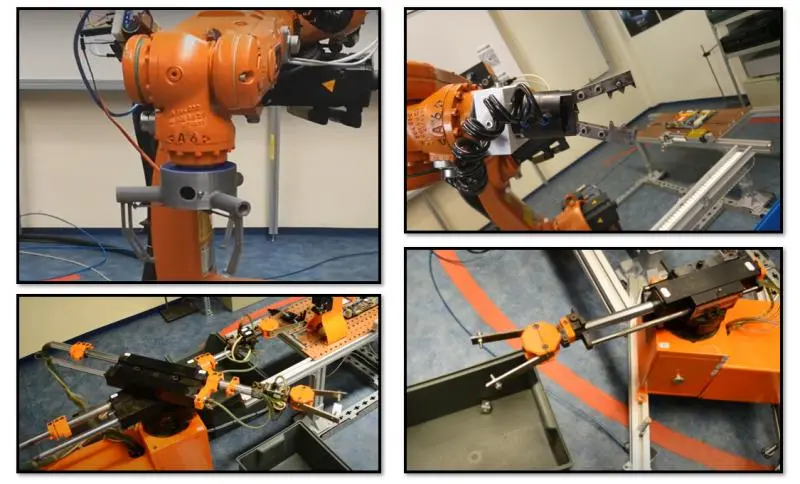
- Industrial collaborative robots are an important pillar of the industry, but old machine units could be improved in several areas, be it a controller or a gripper. The customized collaborative robot units developed have their own HMI/GUI and autonomous control system. The robot arm is designed using 3D CAD software, followed by FEM simulation.
- After the evaluation of the results, the additive manufacturing process is selected, followed by the production of the components and assembly of the robotic arm. The custom-built grippers are designed and manufactured in a similar way, with the grippers being sized according to the requirements of the task. One of the main criteria for the gripper is a high degree of flexibility, i.e. the robot units can be connected independently of their control system and embedded Operating System. The grippers are modular in design, with all types providing image analysis via the network (using a built-in camera). This would also allow the detection of potentially damaged elements on the production lines.
- Data storage is also possible within the gripper if it contains a single card computer, enabling MicroSD card storage as well. An operator on the production line could download the data stored during a given shift for further analysis. The modular design allows students to design additional elements and modules themselves. The results are also shared with our industrial partners. They can then decide to integrate it into their own production systems, saving time and money.
Last update:
2026. 03. 05. 13:31