Dr. Menyhárt József kutatási témák
Elektromos járművek hajtás- és energiamenedzsmentjének optimalizálása, V2G és V2H technológiák alkalmazásával
A kutatás célja olyan integrált hajtás- és energiamenedzsment stratégiák fejlesztése, amelyek növelik az elektromos járművek energiahatékonyságát, élettartamát és hálózati együttműködési képességét. A V2G (Vehicle-to-Grid) és V2H (Vehicle-to-Home) technológiák lehetőséget nyújtanak a járművek energiatárolóként való használatára, így csökkentve a hálózati terhelést és növelve a megújuló energiaforrások integrációját. A kutatás kiterjed a töltési ciklusok optimalizálására, prediktív vezérlési algoritmusokra, valamint a rendszer szimulációs és gyakorlati tesztelésére is.
Járműipari folyamatok optimalizálása mesterséges intelligencia alkalmazásával – minőségbiztosítás és lean szemlélet integrálása
A kutatás középpontjában a mesterséges intelligencia (AI) alapú módszerek ipari folyamatokra gyakorolt hatásának vizsgálata áll, különös tekintettel a minőségbiztosítás és a lean menedzsment integrációjára. A cél olyan prediktív és adaptív modellek kidolgozása, amelyek valós idejű döntéstámogatást nyújtanak gyártási, karbantartási és logisztikai folyamatokban. A kutatás foglalkozik a hibafelismerés, folyamatstabilitás és veszteségcsökkentés lehetőségeivel AI támogatással, valamint az ember-gép együttműködés új aspektusaival az ipar 4.0 környezetében.
Reverse engineering alkalmazása a járműipari minőségbiztosításban
A téma célja a reverse engineering technológiák (például 3D szkennelés, digitális modellalkotás és formaelemzés) alkalmazási lehetőségeinek feltárása a járműipari minőségbiztosítási folyamatokban. A kutatás során sor kerül a geometriai pontosság ellenőrzésének, hibakeresésnek és gyártási toleranciák összevetésének vizsgálatára. A digitális ikerpár koncepciójának felhasználása elősegíti a visszacsatolási ciklusok lerövidítését, valamint a gyors prototípusgyártást és alkatrész-reprodukciót. A kutatás gyakorlati alkalmazási példákon keresztül demonstrálja a reverse engineering szerepét a minőségbiztosítási rendszer megbízhatóságának növelésében
Dr. Tiba Zsolt kutatási témái
Torsen Differenciálművek kinematikai és teljesítmény átvitelének elemzése
Bolygóműves automata sebességváltók kinematikai elemzése különös tekintettel a Ravigneaux összetett bolygóműves alkalmazásokra
Dr. Szemes Péter Tamás kutatási témái
2022-es VW Crafter elektromos és diesel stílusú „Power Split” hibrid hajtáslánc üzemanyag-fogyasztásának optimalizálása
Kutatási partnerek: Ahmed Nabil Farouk Abdelbaky, Aminu Babangida, és Dr. Abdullahi Bala Kunya (Nigéria)
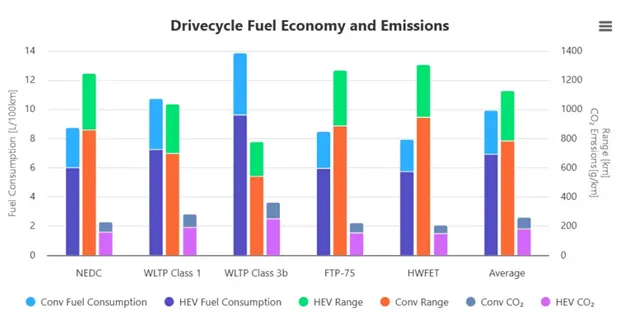
Összefoglaló: Ez a tanulmány egy 2022-es Volkswagen Crafter (VW) 35 TDI340 kisteherautó hagyományos dízel hajtásláncról teljesítményelosztó vagy soros párhuzamos hibrid elektromos járművé (HEV) való átalakítását írja le. Egy kisebb lítium-ion akkumulátorral támogatott bolygóműves teljesítményelosztó eszközön keresztül integráltak egy kisebb lítium-ion akkumulátorral ellátott dízelmotort és egy elektromos motor-generátor egységet. Kifejlesztették a hibrid rendszer MATLAB/Simulink modelljét, és a sebességkövető PID szabályozóját genetikus algoritmus (GA) és részecskeraj-optimalizálási (PSO) módszerekkel optimalizálták. A szimulációs eredmények jelentős hatékonyságnövekedést mutatnak: például az átlagos üzemanyag-fogyasztás 9,952-ről 6,913 l/100 km-re csökken (30,5%-os megtakarítás), a CO₂-kibocsátás pedig 260,8-ról 181,0 g/km-re csökken (79,8 g-os csökkenés), míg a 75 literes tankkal megtehető hatótávolság ~43,3%-kal nő (785,7-ről 1126,0 km-re). Az optimalizált soros-párhuzamos hajtáslánc-kialakítás jelentősen javítja a városi vezetési gazdaságosságot és csökkenti a károsanyag-kibocsátást a teljesítmény feláldozása nélkül.
Lineáris kvadratikus szabályozó optimális tervezése járműfelfüggesztési rendszerhez bakteriális memetikus algoritmus alapján
Kutatási partnerek: Bala Abdullahi Magaji, Aminu Babangida, és Dr. Abdullahi Bala Kunya (Nigéria)
Összefoglaló:
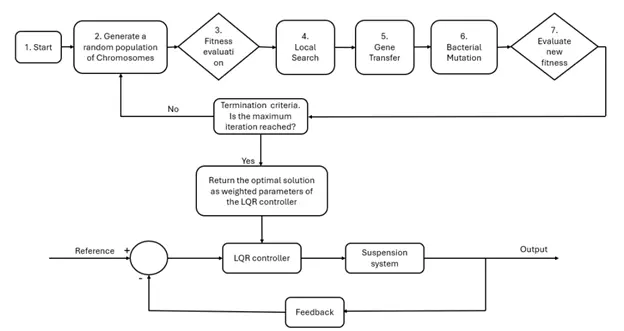
Egy jármű felfüggesztésének megfelelően kell működnie a vezetési kényelem és biztonság biztosítása érdekében. Hagyományosan a jármű felfüggesztésének vezérlését próbálgatással vagy klasszikus technikákkal végzik, amelyek nem garantálják az optimális teljesítményt változó útviszonyok között. A kutatás célja egy lineáris kvadratikus szabályozón alapuló bakteriális memetikus algoritmus (LQR-BMA) kidolgozása autók felfüggesztési rendszereihez. A BMA ötvözi a baktériumok táplálkozási optimalizáló algoritmust (BFOA) és a memetikus algoritmust (MA) a keresési folyamat hatékonyságának növelése érdekében. Az LQR vezérlőrendszer a felfüggesztés viselkedését az optimális visszacsatolási nyereségek meghatározásával állítja be a BMA segítségével. A szabályozási cél a jármű és a felfüggesztési rendszer véletlenszerű rezgésének és oszcillációjának jelentős csökkentése vezetés közben, ezáltal simábbá téve a rugózást és javítva az úttartást. A BMA olyan szabályozási paramétereket alkalmaz, amelyek támogatják a biológiai vonzást, a szaporodást és az eliminációs-szétszóródási folyamatokat a keresés felgyorsítása és a program stabilitásának fokozása érdekében. Egy algoritmus segítségével a tér több részét vizsgálja, és javítja annak értékét a szabályozási nyereségek optimális beállításának meghatározásához.
A forgalomérzékelés összehasonlító elemzése mélytanulás segítségével: esettanulmány Debrecenben
Kutatási partnerek: Joao Porto, Pedro Sampaio, Hemerson Pistori (Brazília) és Dr. Menyhárt József
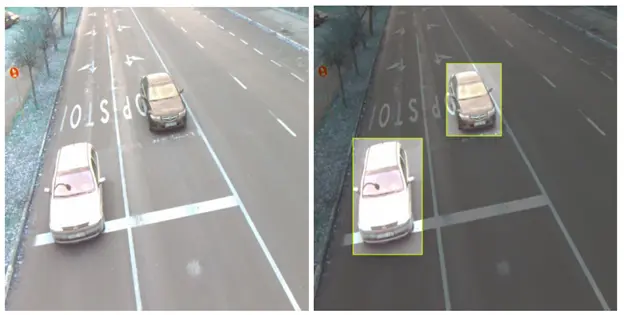
Összefoglaló: Ez a kutatás a városi környezetben használt járművek észlelésére szolgáló mélytanulási modelleket értékeli, hangsúlyozva a regionális adatok és a szabványosított metrikák szerepét. A kísérleteket a DebStreet segítségével végezték, amely egy új adathalmaz, amely egy adott városi környezetből, különböző időjárási körülmények között rögzített képekből áll, és négy architektúrát foglalt magában: Faster R-CNN, YOLOv8, DETR és Side Aware Boundary Localization (SABL). Ezek közül a SABL és a YOLOv8 kiemelkedett azzal, hogy nagy pontosságot és robusztusságot nyújtott különböző forgatókönyvekben, figyelemre méltóan hasonló módon, míg a DETR egyértelmű javulást mutatott a kiterjesztett betanítással és a megnövekedett adatmennyiséggel, a Faster R-CNN pedig versenyképesnek bizonyult gondos optimalizálás esetén. Ezek az eredmények rávilágítanak arra, hogy a konzisztens értékelési protokollok regionálisan reprezentatív adathalmazokkal való integrációja hogyan támogathatja az intelligens városi mobilitási rendszerek hatékonyabb és alkalmazkodóbb megoldásait.
Kertész József kutatási témái
Gépjárművek ütközésbiztonságának fokozása konstrukciós megoldással
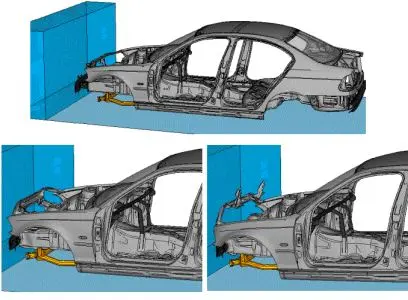
A kutatás célja, hogy hozzájáruljon a gépjárművek passzív biztonságának növeléséhez innovatív konstrukciós megoldások révén. Kiemelt figyelmet fordítunk a crashbox szerkezetek fejlesztésére, különös tekintettel azok fémhabbal történő integrálására és geometriai optimalizálására. A projekt célkitűzései közé tartozik olyan energiaelnyelő rendszerek fejlesztése, amelyek ütközés esetén hatékonyabban csillapítják az ütközési energiát, ezáltal csökkentve a jármű utasterére jutó terhelést és a személyi sérülések kockázatát. A kutatás során különböző crashbox geometriák és fémhab anyagkombinációk viselkedését vizsgáljuk statikus és dinamikus terhelés alatt. E célból kísérleti zömítő vizsgálatokat, valamint végeselemes szimulációkat végzünk. A vizsgálatok kiterjednek az energiaelnyelési kapacitás, a deformációs módok, valamint a szerkezeti integritás értékelésére. A kutatás várható eredménye olyan adaptív crashbox rendszerek kialakítása, amelyek a jármű különböző típusaihoz és ütközési szcenárióihoz igazíthatók. Hipotézisünk szerint a fejlesztések eredményeként jelentősen javítható a gépjárművek ütközésbiztonsági teljesítménye, miközben csökkenthetők a szerkezeti sérülések és a javítási költségek, továbbá hozzájárulhatunk a jövő járműbiztonsági szabványainak alakításához is.
RDE alapú emisszió- és energiahatékonyság-vizsgálat
A kutatás célja a járművek valós közúti körülmények között történő károsanyag-kibocsátásának és energiahatékonyságának vizsgálata korszerű mobil mérési technológiák alkalmazásával. A kutatás keretében AVL M.O.V.E rendszer segítségével RDE (Real Driving Emissions) módszert alkalmazunk, amely lehetővé teszi, hogy a járművek emissziós viselkedését laboratóriumi körülményektől függetlenül, a mindennapi közlekedési szituációkban vizsgáljuk. Különös figyelmet fordítunk a hibrid hajtásláncú gépjárművek villamosenergia-használatának elemzésére: a vizsgálatok során a belső égésű motor és az elektromos hajtásrendszer közötti energiaáramlás, valamint azok hatásfoka kerül értékelésre. A mérési adatok alapján képet kaphatunk a különböző vezetési stílusok, útvonalak és környezeti feltételek hatásáról az emissziós értékekre és az energiamérlegre. A kutatás során alkalmazott módszerek között szerepelnek valós idejű fedélzeti mérések, CAN hálózati adatgyűjtés, GPS-alapú mozgásanalízis, valamint a járműdinamikai és emissziós adatok szinkronizált kiértékelése. A kutatás eredményeként pontosabb és megbízhatóbb képet alkothatunk a járművek valós közúti körülmények közötti környezeti terheléséről, továbbá hozzájárulhatunk az emissziócsökkentési stratégiák fejlesztéséhez, valamint az elektromos és hibrid járművek optimalizált üzemeltetéséhez.
Erdei Timotei István kutatási témái
Ipar 5.0: Robotika és mesterséges intelligencia a járműgyártásban
Ipar 5.0 gyártórendszerek AR/VR betanítást segítő oktatási szoftverek fejlesztése
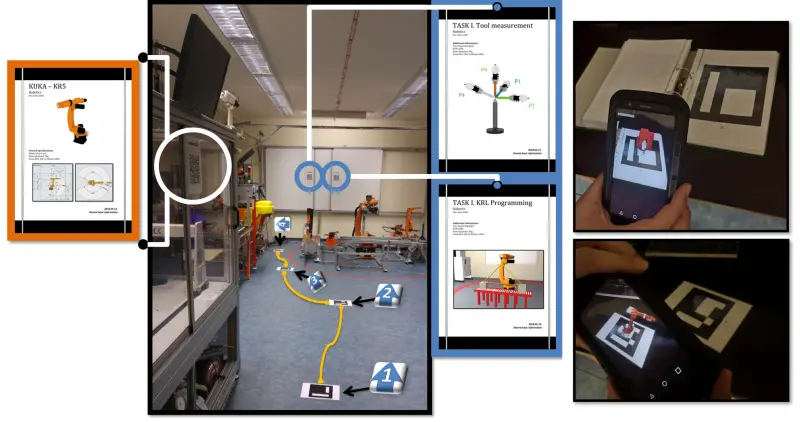
Az Ipar 5.0 új kihívásokat támaszt a mérnökökkel szemben, középpontba helyezve a technológia és az emberi intelligencia harmonikus együttműködését. A technológia rohamos fejlődése miatt elengedhetetlen, hogy a szakemberek gyorsan tudjanak alkalmazkodni és elsajátítani az új eszközöket, amelyek széles körű integrációja az iparba és az oktatásba még gyerekcipőben jár. Erre a kihívásra ad választ a Cyber-Physical & Intelligent Robot Systems laboratórium kutatása, amely a kiterjesztett és virtuális valóság (AR/VR) technológiáival kínál megoldásokat. Ezek az eszközök lehetővé teszik, hogy a jövő mérnökei hatékonyan készüljenek fel a digitális gyártási folyamatokra. Az AR-alapú rendszerekkel a gyártósori folyamatok könnyedén vizualizálhatók markerek vagy QR-kódok segítségével, míg a VR-rendszerekkel speciális betanítási és karbantartási alkalmazásokat lehet fejleszteni, amelyekkel az ipari feladatok készségszinten sajátíthatók el egy biztonságos, virtuális környezetben. A technológia lehetővé teszi egy valós gép vagy gyártórendszer virtuális másának létrehozását, amely pontosan megegyezik az eredeti fizikai paramétereivel. Ezáltal a robotok betanítása és programozása online módon, a valós gép használata nélkül is megvalósítható, ami felgyorsítja és költséghatékonnyá teszi a fejlesztési folyamatokat.
Gyártás digitalizálása: Valós rendszerek virtuális elérése kiberfizikai rendszereken keresztül (digitális-ikerpár).
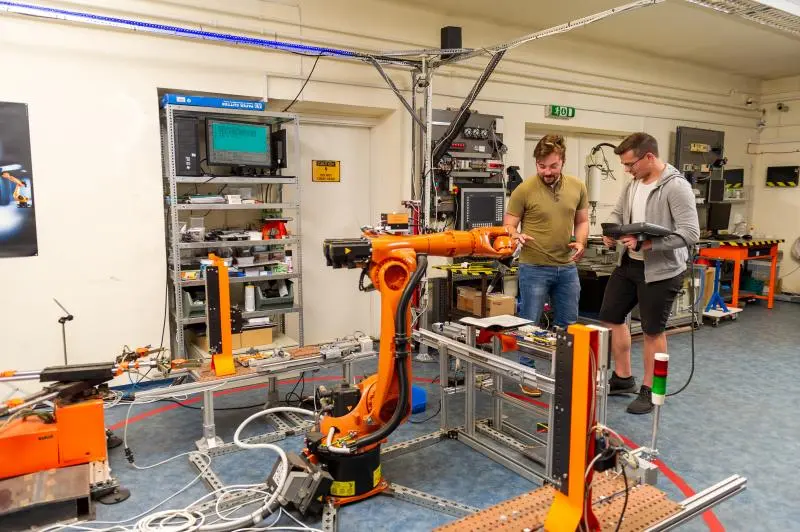
A fizikai rendszerek virtuális megjelenítése a kiberfizikai térben kulcsfontosságú a hatékonyság növeléséhez. Ezzel a digitalizációs megközelítéssel felszabadul az adatfeldolgozásra fordított idő, ami más, produktív feladatokra fordítható. A fejlesztés során a robotrendszerek kiberfizikai térbe való átültetésekor a valósághű ábrázolás kiemelten fontos. A modelleket poligon-redukciót követően egy belső szerver adatbázisba töltik fel, ahol markerek segítségével, belső hálózaton keresztül lehet őket lekérdezni. Ezek a 3D modellek méretükben és fizikai paramétereikben is a valóságot tükrözik, így ugyanazok a feladatok hajthatók végre velük, mint a valódi gépekkel. A saját szimulációs környezetbe integrált robotegységek teljes mértékben programozhatók és vezérelhetők. A rendszer végső célja, hogy az „offline” megírt programok a kiberfizikai térben összekapcsolódjanak a valódi gépekkel, és futtathatók legyenek. Ez a hardware-in-the-loop és software-in-the-loop tesztelés lényege. Ezáltal lehetőség nyílik arra, hogy a fejlesztők biztonságosan, virtuálisan végezhessenek el egyedi vezérléseket és teszteléseket, és amennyiben az eredmények megfelelőek, a programok azonnal futtathatóak a valódi gépeken is.
Autonóm jármű (AGV-AMR) fejlesztése ipari logisztikai és mezőgazdasági alkalmazásokhoz
Egy új autonóm jármű (AGV) fejlesztése zajlik, amely célja, hogy hatékonyan támogassa az ipari logisztikai és mezőgazdasági feladatokat. A jármű a navigációhoz saját képfeldolgozó rendszert használ, a feladatok kijelölése és a pályatervezés pedig kiterjesztett valóság (AR) technológiával történik. A tesztelési környezetben a jármű nagyfelbontású Vision szenzorokkal és hálózatra csatlakoztatott PTZ IP kamerákkal elemzi a környezetét. Ezek a kamerák valós idejű képet streamelnek, így az AGV képes felismerni és elkerülni az akadályokat, illetve az embereket. A jármű moduláris felépítésű, így könnyen adaptálható különféle feladatokhoz, például anyagmozgatáshoz, felderítéshez, járőrözéshez, betakarításhoz vagy permetezéshez. A mezőgazdasági alkalmazásokhoz, ahol a környezet kevésbé ellenőrzött, a jármű egy mobil drónnal egészül ki. Ez a drón a járműről száll fel, segít a terület feltérképezésében és a pozíciók beazonosításában (markerek/QR-kódok segítségével), ráadásul a járműről tölthető is. A rendszert a gépjárműiparban is elterjedt, Linux alapú ROS OS (Robot Operating System) vezérli, amely az adatok feldolgozásáért és kiértékeléséért felelős. A jármű maga 5G-n vagy saját hálózaton keresztül távvezérelhető és távfelügyelhető. A cserélhető és bővíthető akkumulátorok révén a működési idő a feladathoz igazítható, a HMI (Human Machine Interface) pedig lehetővé teszi a feladatok monitorozását és a jármű állapotának lekérdezését. A mezőgazdasági területen fellépő váratlan események (például időjárási változások) kezelésére a jármű Deep Learning módszerrel tanul, így képes felismerni és helyesen reagálni a megváltozott körülményekre.
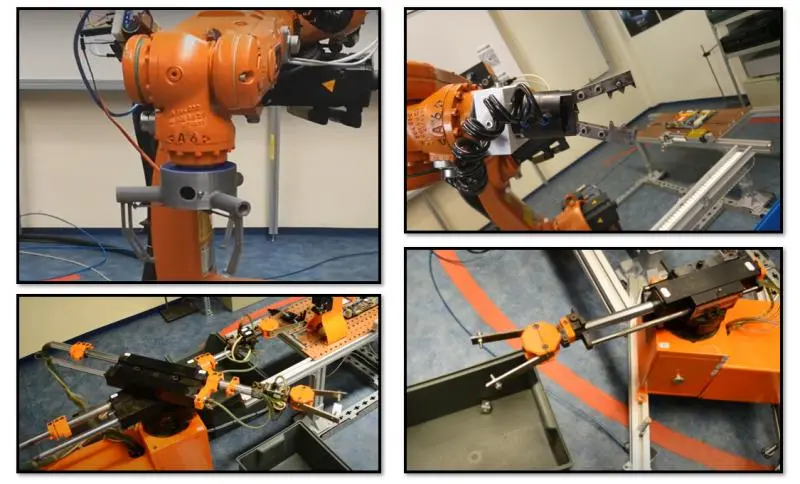
Egyedi fejlesztésű kollaboratív robotkarok és ipari megfogók fejlesztése
Az ipari kollaboratív robotok kulcsszerepet játszanak a modern gyártásban, de a meglévő gépegységek továbbfejlesztése, mint például a vezérlők és megfogók modernizálása, is jelentős hatékonyságnövekedést hozhat. Saját fejlesztésű robotegységeink egyedi HMI/GUI-val és önálló vezérlőrendszerrel rendelkeznek. A robotkar tervezése 3D CAD szoftverrel és FEM szimulációval történik, majd az eredmények alapján választjuk ki a megfelelő additív gyártási eljárást. A moduláris felépítésnek köszönhetően a hallgatók maguk is tervezhetnek kiegészítő elemeket, az ipari partnerek pedig időt és költséget takaríthatnak meg a bevált technológia integrálásával.
Flexibilis megfogók és okos gyártósorok
A megfogók fejlesztésének egyik fő szempontja a flexibilitás, vagyis hogy a különböző robotvezérlőktől függetlenül is csatlakoztathatóak legyenek. A megfogókba épített kamera segítségével képelemzés valósul meg, ami lehetővé teszi a sérült elemek kiszűrését a gyártósorokon. Az adatok tárolása egy beépített egykártyás számítógép és MicroSD kártya segítségével történik, így az operátorok műszak után letölthetik és elemezhetik azokat. A moduláris felépítésnek köszönhetően a diákok további elemeket és kiegészítő modulokat is tervezhetnek. A fejlesztés eredményeit megosztjuk ipari partnereinkkel, így ők is profitálhatnak a technológiából, megtakarítva ezzel a költségeket és az időt.
Mesterséges Intelligencia vezérelt minőségellenőrzés kollaboratív és ipari robotokkal
A rendszer a kollaboratív robotok (cobotok) precizitását és az AI-alapú gépi látás elemző képességét egyesíti. A cobotok feladata az, hogy a gyártósorról érkező alkatrészeket rendkívüli pontossággal mozgassák és pozícionálják a beépített, nagyfelbontású kamerák elé. Az AI ezután valós időben elemzi a kamerák által rögzített képeket. A rendszer egy előre betanított mélytanulási modell segítségével azonosítja és osztályozza a legapróbb hibákat is, legyen szó felületi karcokról, repedésekről, színeltérésekről vagy geometriai pontatlanságokról, amelyeket az emberi szem könnyen elkerülhet. A folyamat során az AI azonnali visszajelzést küld a cobotnak, amely a hiba típusától függően a megfelelő helyre helyezi a hibás alkatrészeket, vagy továbbengedi a tökéletes darabokat. Ez a valós idejű, automatizált döntéshozatal jelentősen felgyorsítja a gyártási folyamatot, miközben minimalizálja az emberi beavatkozás szükségességét.
Ipar 4.0 gyártórendszerek AR/VR betanítást segítő oktatási szoftverek fejlesztése
- Célkitűzés
- A robottechnika területén az aktuális virtualizációs technológiák innovatív integrálása az oktatásba.
- Az oktatási módszerek igazítása Ipar 4.0 elvárásaihoz.
- További információk
Gépjárművek ütközésbiztonságának fokozása konstrukciós megoldással
- Célkitűzés:
- A kutatás célja a gépjárművek ütközésbiztonságának fokozása a tömegoptimalizáció figyelembe vételével.
- Ezt a látszólag ellentétes követelményt csak új társított anyagok kifejlesztésével és optimalizált konstrukcióval érhető el.
- További információk
Valós, fizikai gyártórendszerek virtuális elérhetőségének biztosítása a kiberfizikai rendszerbe való integrálásával
- Célkitűzés:
- Valós rendszerek áthelyezése a kibertérbe.
- A fejlesztés során az alkalmazott robotrendszerek kiberfizikai térbe való átültetésekor a valósághű ábrázolás fontos kritérium.
- További információk
AGV autonóm jármű fejlesztése ipari logisztikai és mezőgazdasági feladatok ellátására
- Célkitűzés:
- AGV moduláris elemekből felépülő, az aktuális feladathoz (anyagmozgatás, felderítés, járőrözés, betakarítás, öntözés, permetezés, stb.) méretezhető jármű tervezése és megépítése, mely 5G vagy saját belső hálózaton is távvezérelhető, távfelügyelhető.
- További információk
Egyedi fejlesztésű kollaboratív robotkarok és ipari megfogók fejlesztése
- Célkitűzés:
- Egyedi kollaboratív robotegység tervezése és gyártása, meglévő gépegységek továbbfejlesztésére vezérlők, megfogók alkalmazásával.
- A robotkar tervezése 3D CAD szoftverrel történik, amit FEM szimuláció követ.
- További információk